ardunio rp2024 connect
前言
最近参加了一个followme的活动,活动的任务是ardunio rp2024 connect的板子,主要完成三个任务:
搭建环境并开启第一步Blink三色LED / 串口打印Hello DigiKey & EEWorld!;
学习IMU基础知识,调试IMU传感器,通过串口打印六轴原始数据;
学习PDM麦克风技术知识,调试PDM麦克风,通过串口打印收音数据和音频波形。
纯新手,朋友介绍过来玩的硬件。啥也不会,一边学一边玩吧。
干啥第一件事肯定就是搭环境。
先去ardunio的官网,找安装包,安装ardunio的ide。
现在板子到日本了,估计过两天就到了。

今天终于到了。开箱!!!


由于手头没有mirco的线,先用这个转换头看看。
尝试
1.配置开发环境
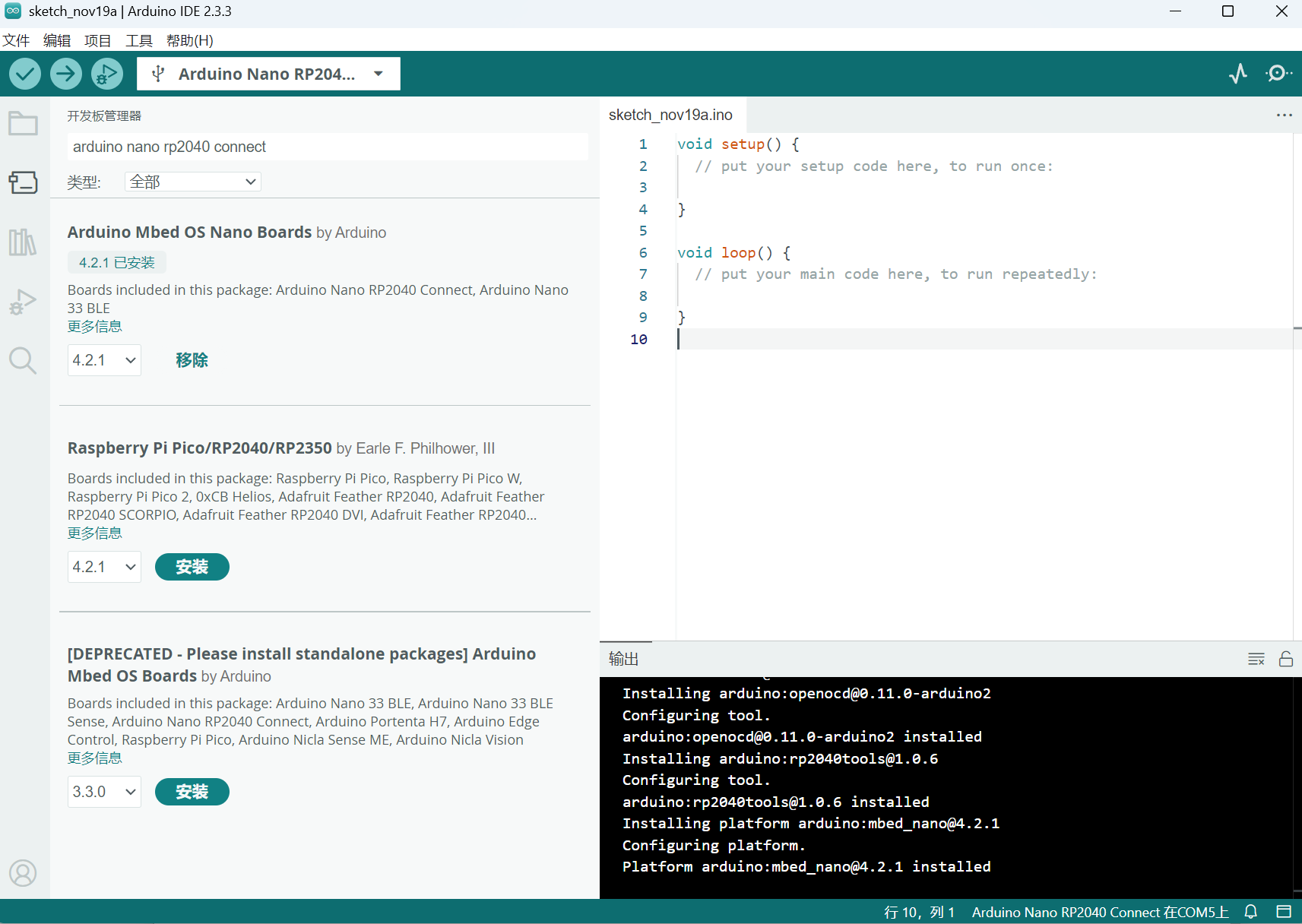
安装ardunio2.3.3 IDE
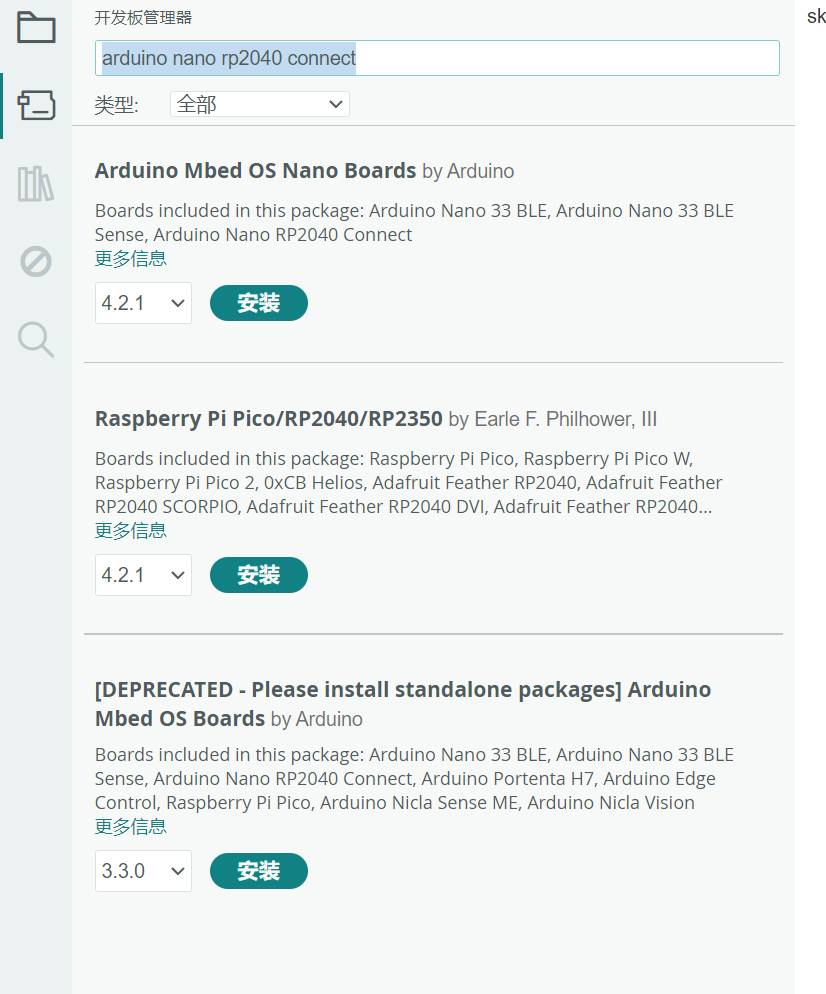
安装板包
搜索开发板的名字 arduino nano rp2040 connect
2.点灯
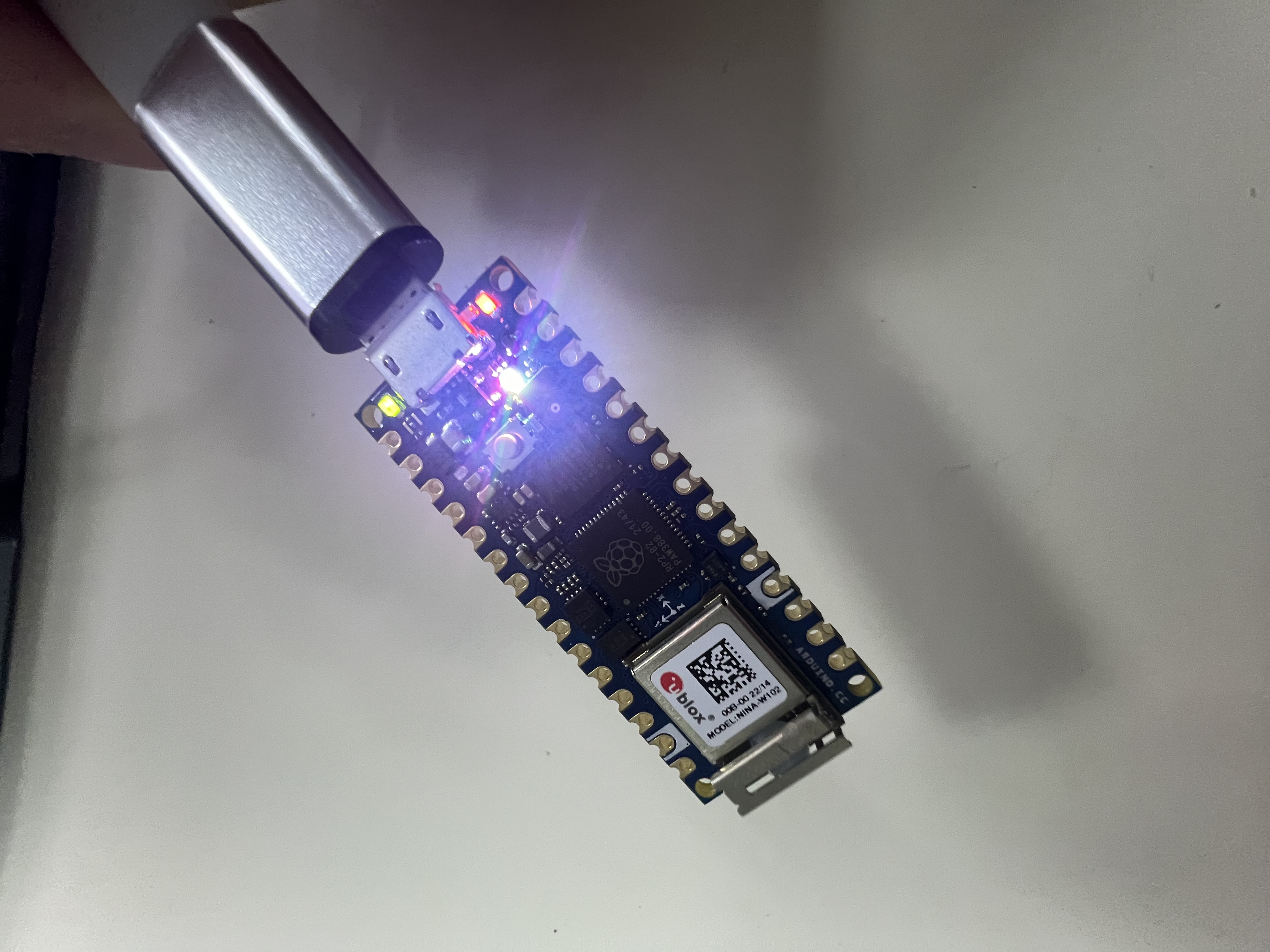
在上述的情况下已经完成安装的操作,我们的板子在连接的时候就一直闪烁。表现为一个红灯间接闪烁,一个灯变色间接闪烁,一个绿灯常亮。
下面开始点灯的操作
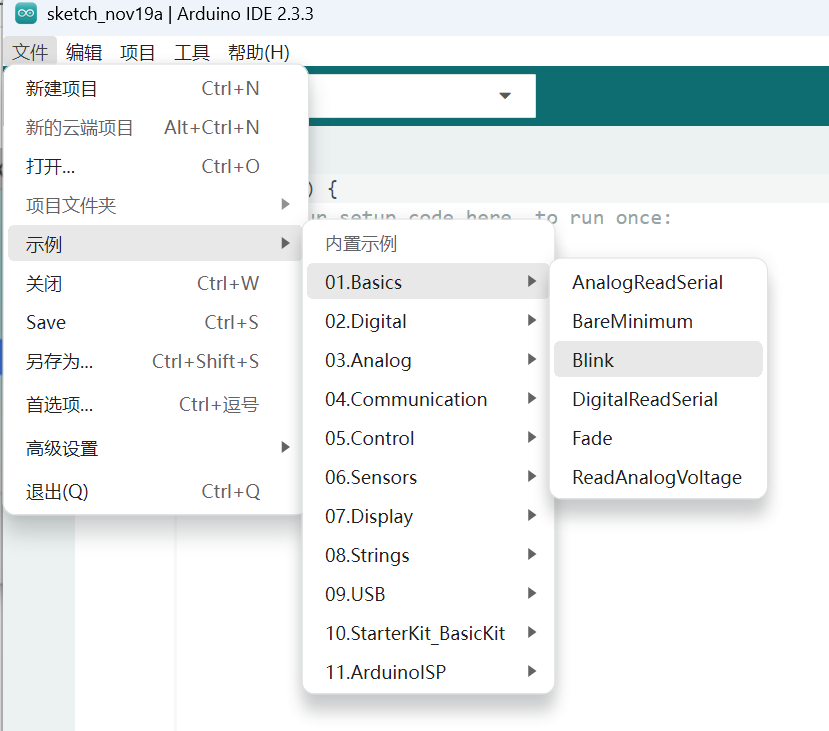
选择Blink,然后点击上传按钮

我们可以看到,板子的灯也变了

恭喜你完成了点灯的操作!!!😘
任务一:搭建环境并开启第一步Blink三色LED / 串口打印Hello DigiKey & EEWorld!;
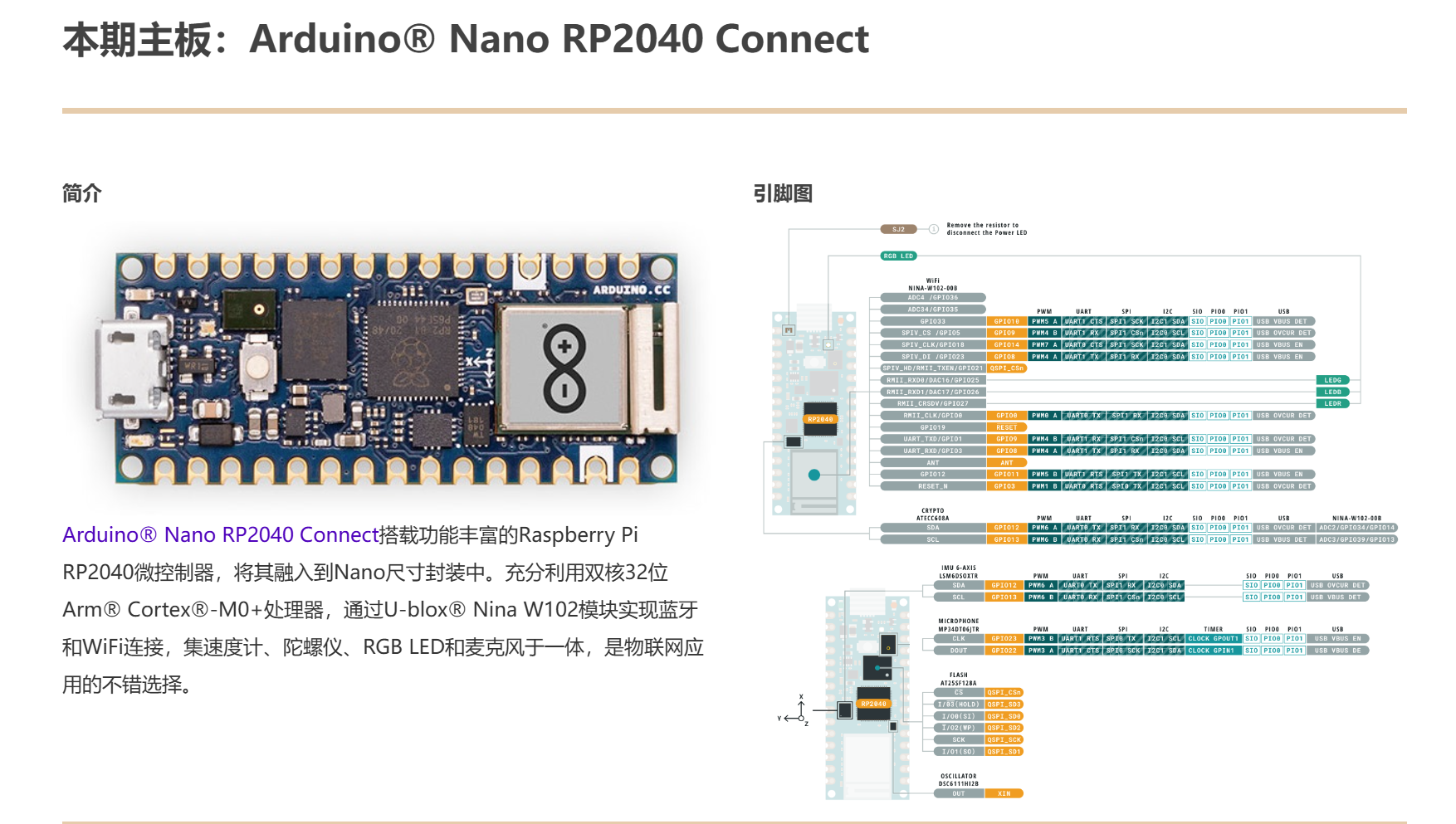
1.查看官方的引脚图
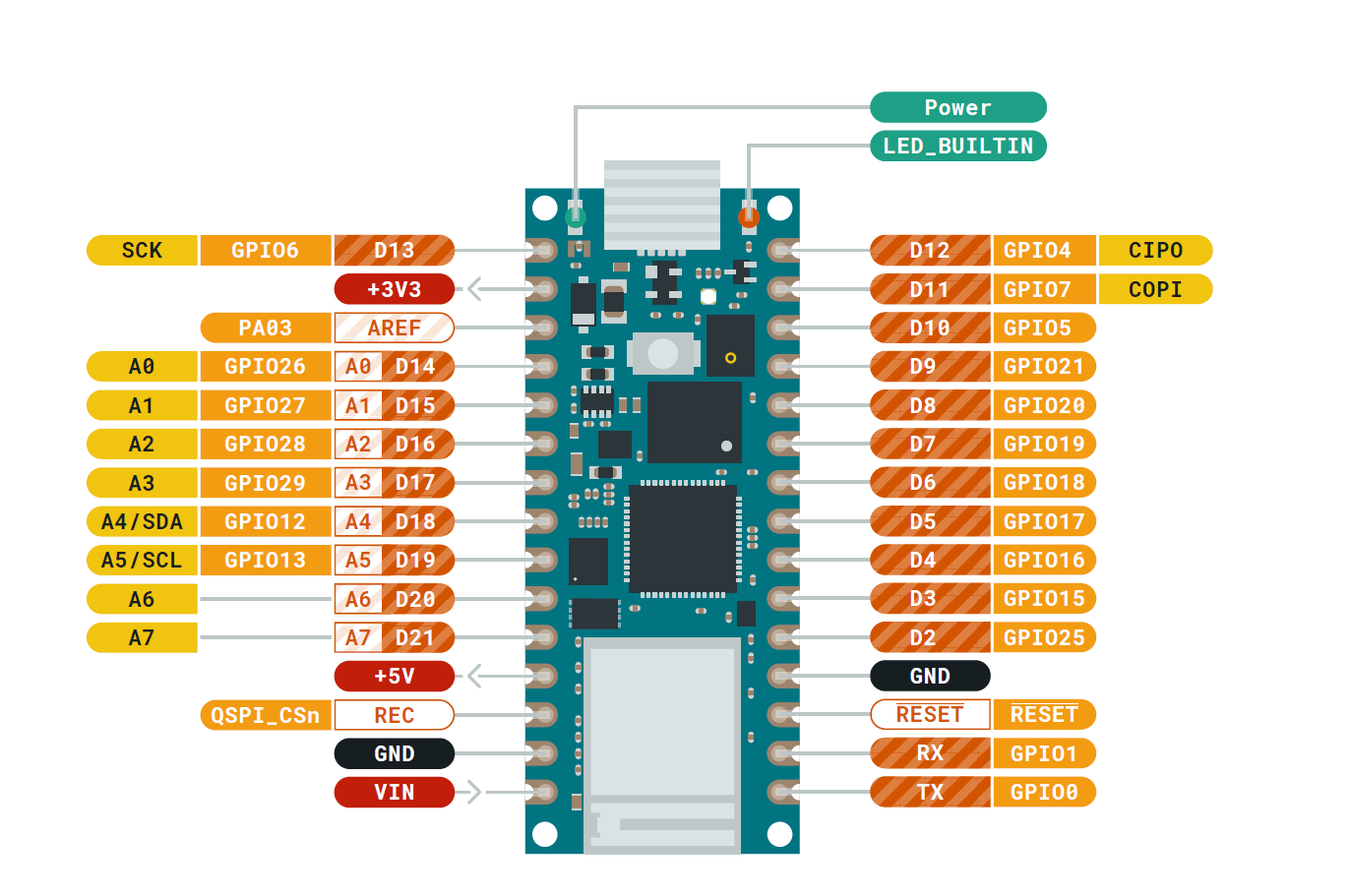
可以看到我们刚才点灯调用的是LED_BUILTIN的引脚。找到我们本次任务的采用的RGBLED的引脚。
因为之前没搞过硬件不太懂,想当然的认为这里的引脚是RGB LED
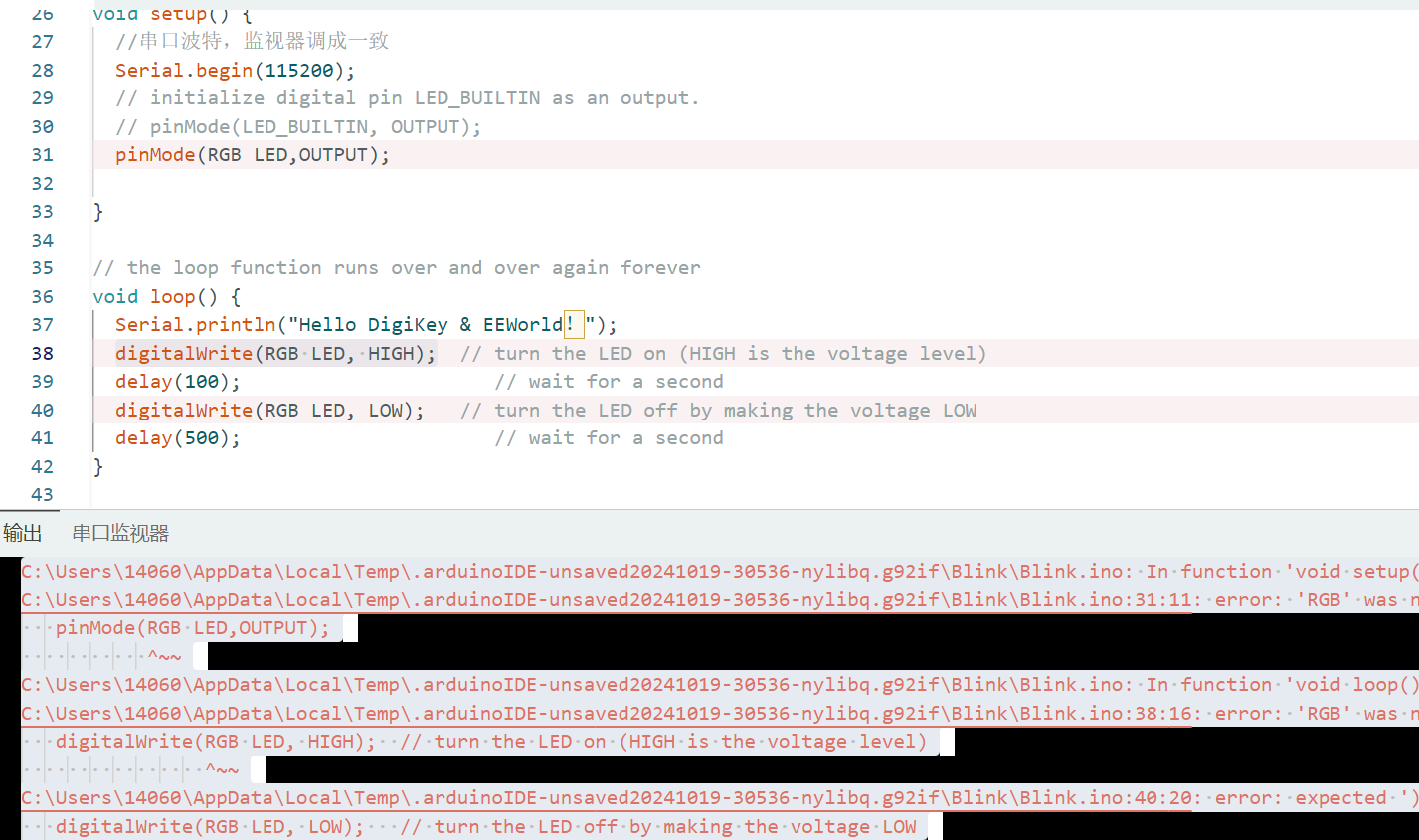
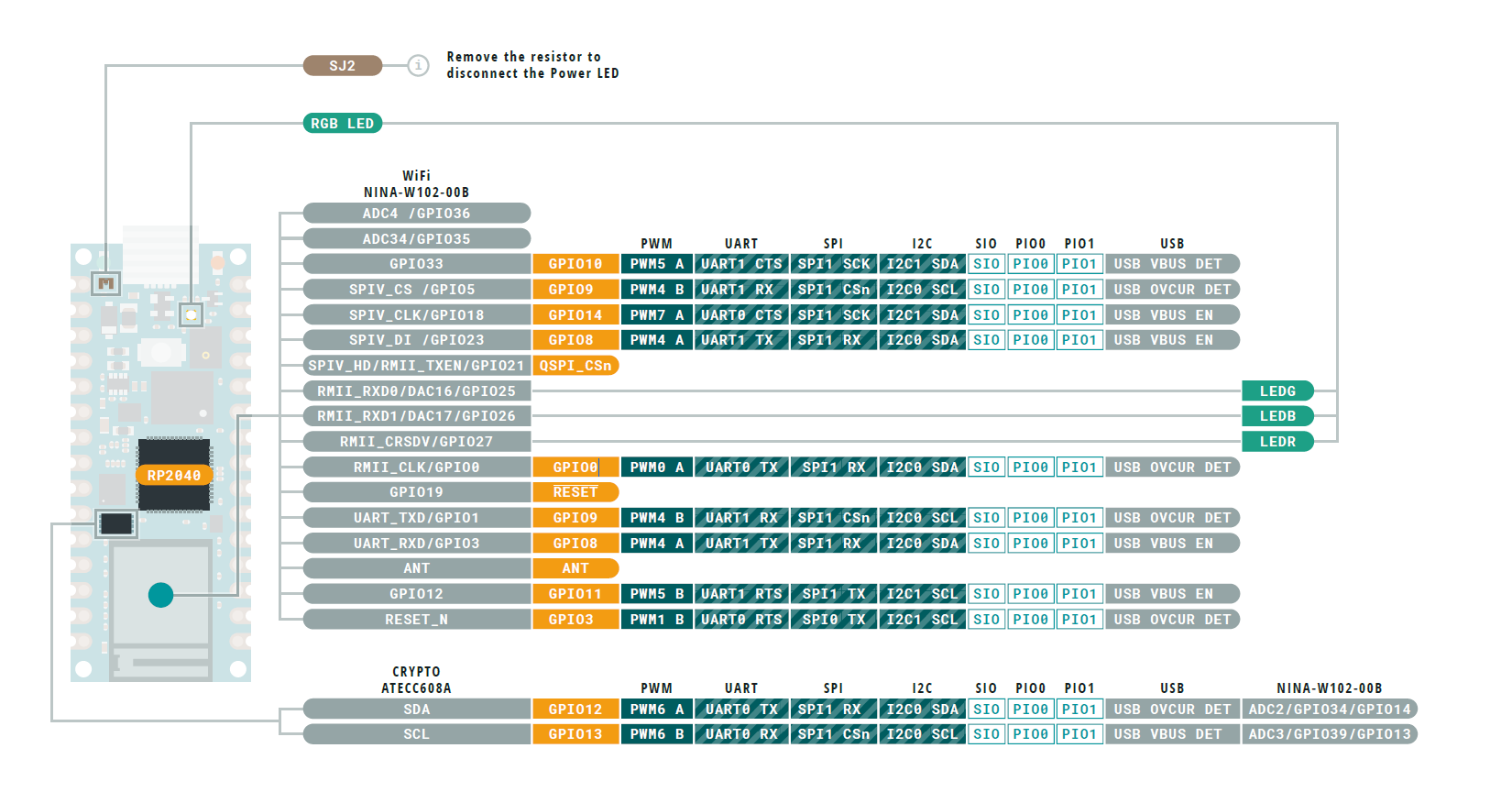
一片红灯,我得试试是不是刚才引脚图里面的LEDR/LEDG/LEDB。
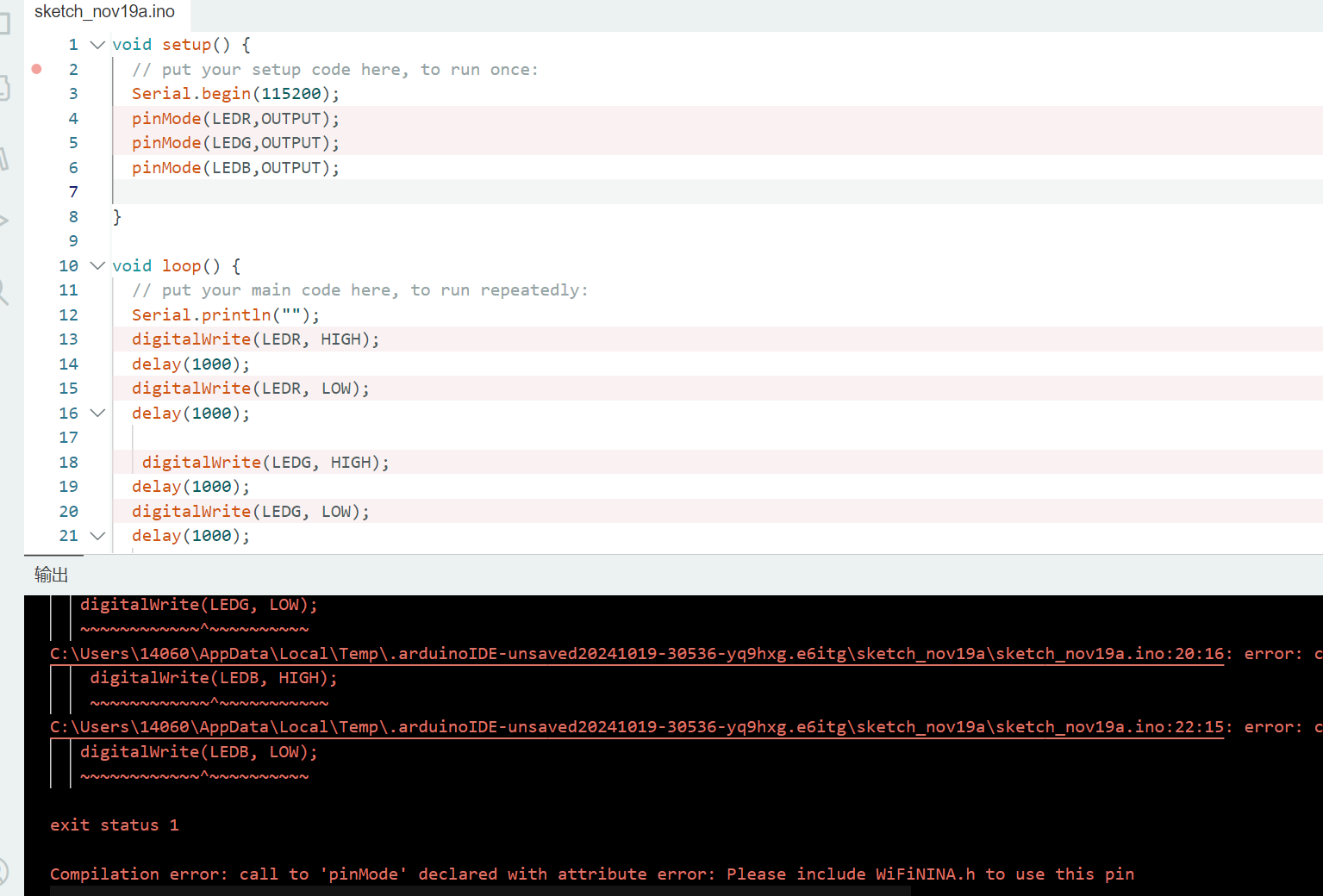
得偿所愿,也是一排红灯。但是有提示,提示这个pin脚在WIFININA的库里面才能使用。我又去官网找到开发文档,相见恨晚!!
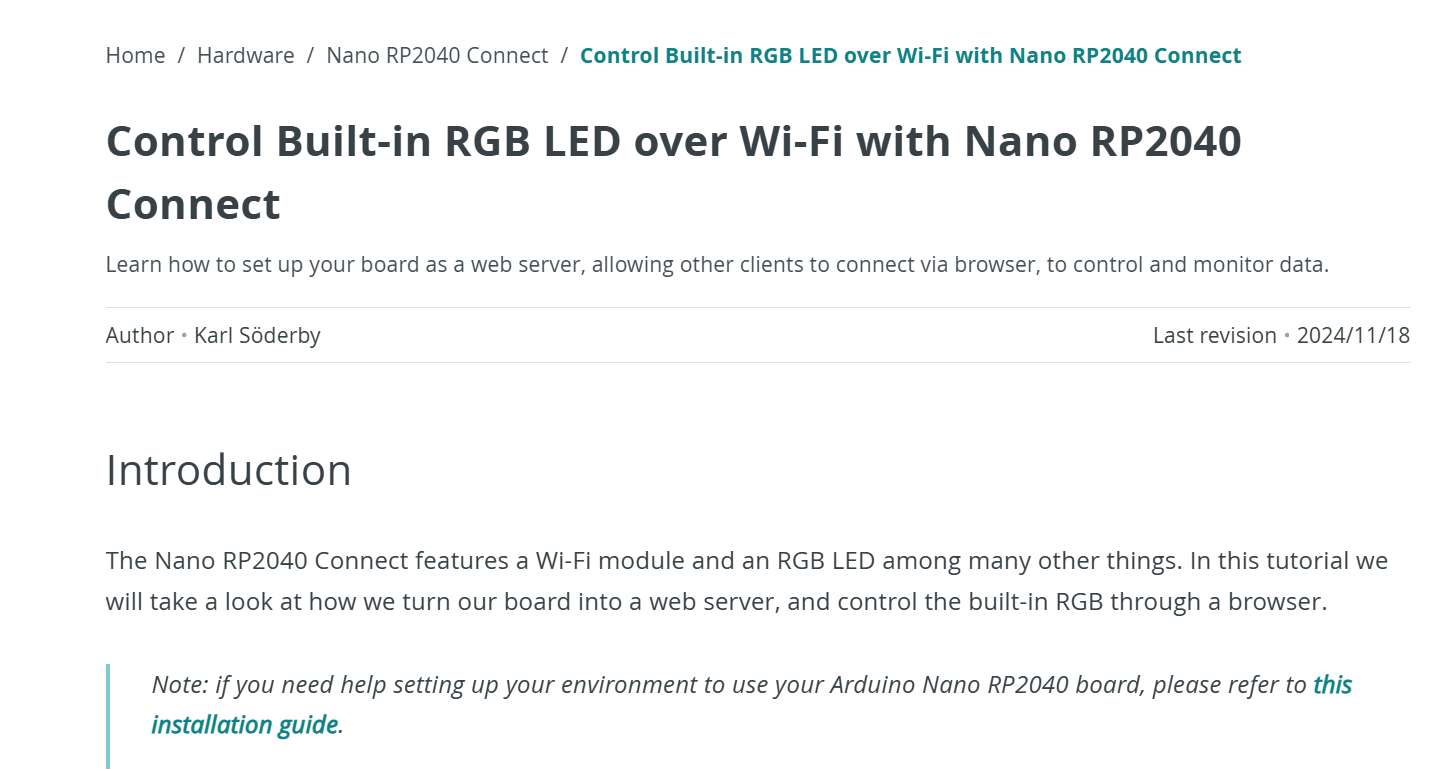
内置的LED。得调库才行。早点发现开发文档就好了。
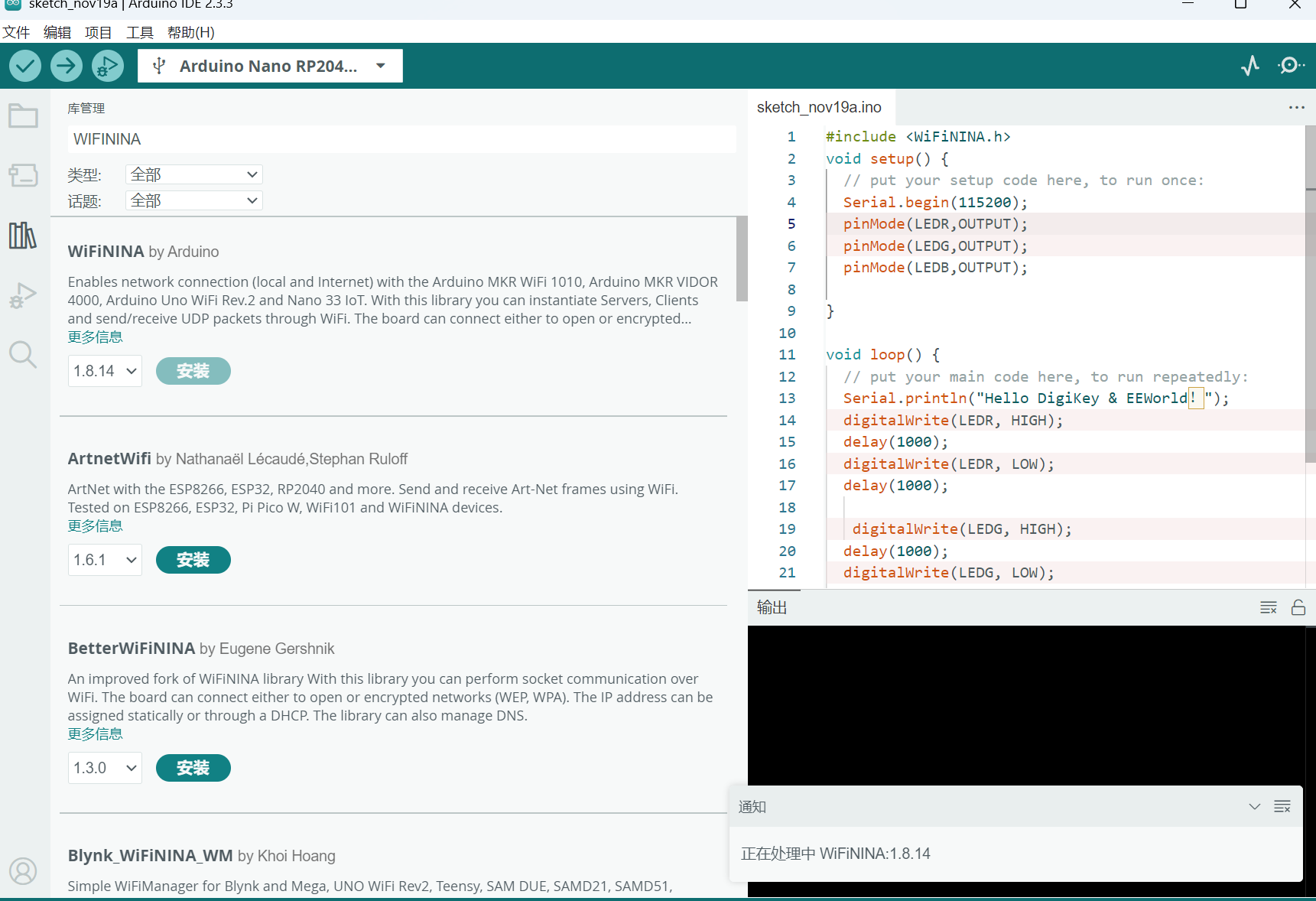
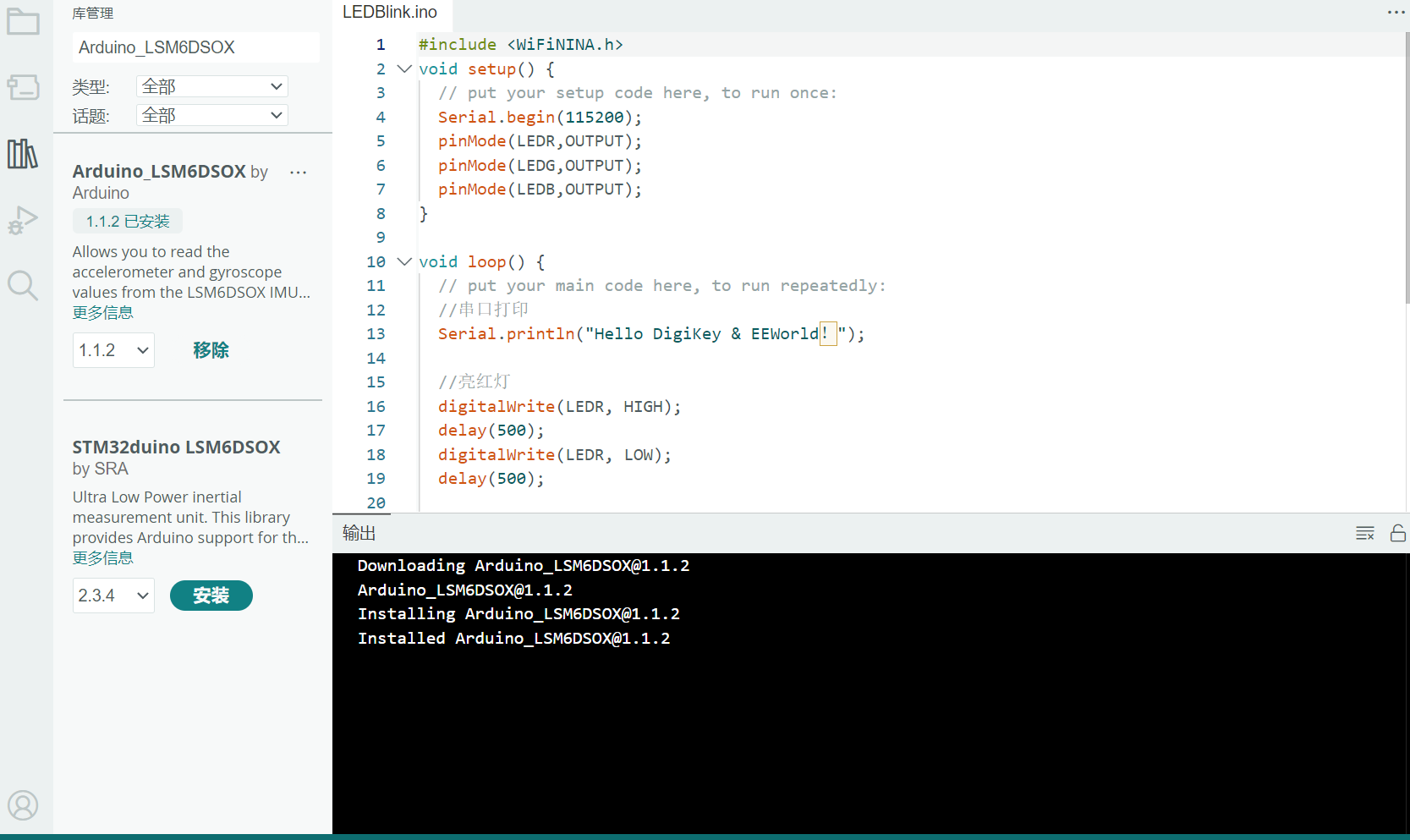
2.安装WIFININA库
好了开始装库WIFININA。
3.成功点亮
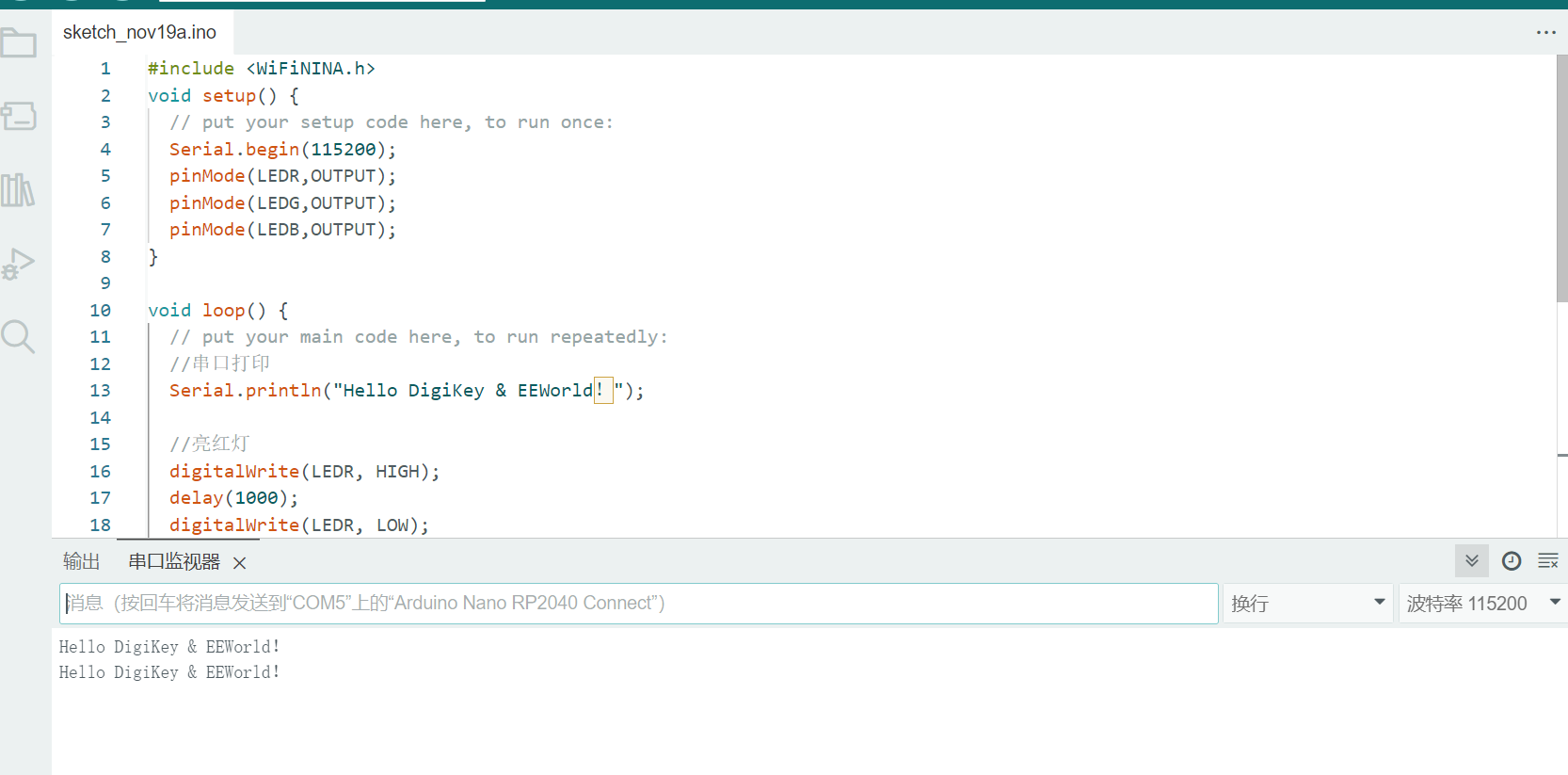
运行成功。代码如下:
|


任务一完成
任务二:学习IMU基础知识,调试IMU传感器,通过串口打印六轴原始数据
要学习 IMU (惯性测量单元) 的基础知识,并通过 Arduino IDE 调试 IMU 传感器以通过串口打印六轴原始数据,可以按照以下步骤操作:
1. 什么是 IMU?
IMU 是一种集成传感器模块,通常包含以下传感器:
- **加速度计 (Accelerometer)**:用于测量线性加速度 (单位:g)。
- **陀螺仪 (Gyroscope)**:用于测量角速度 (单位:°/s 或 rad/s)。
有些 IMU 还包含磁力计 (Compass) 和温度计,但基础的六轴 IMU 只包含加速度计和陀螺仪。
查阅官方文档可知,Arduino Nano RP2040 Connect 板载 IMU 是 LSM6DSOX,它是一个六轴传感器:
**加速度计 (Accelerometer)**:测量线性加速度 (单位:m/s²)。
**陀螺仪 (Gyroscope)**:测量角速度 (单位:°/s)。
2.安装Arduino_LSM6DSOX库
新建一个开始新的任务。
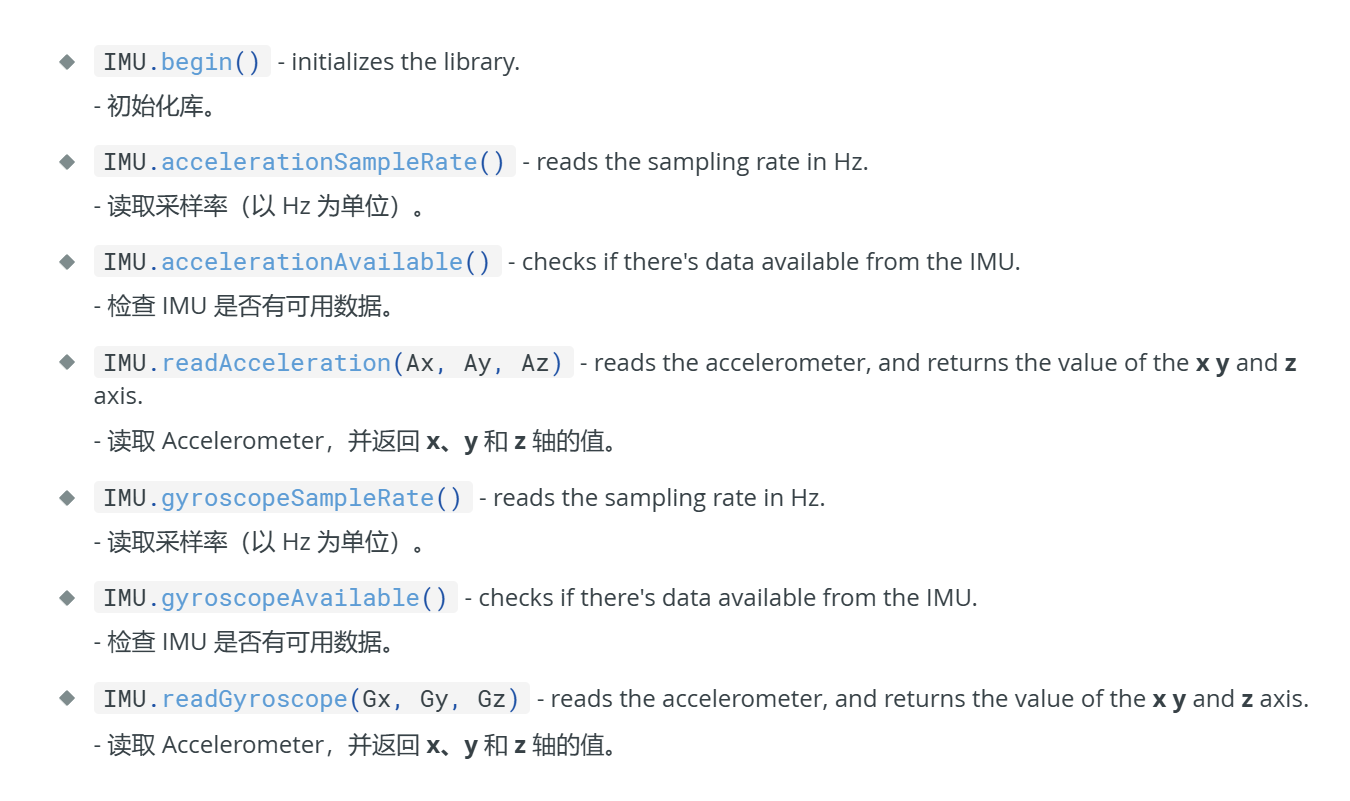
根据官方文档的函数,我们可以得到如下代码:
|
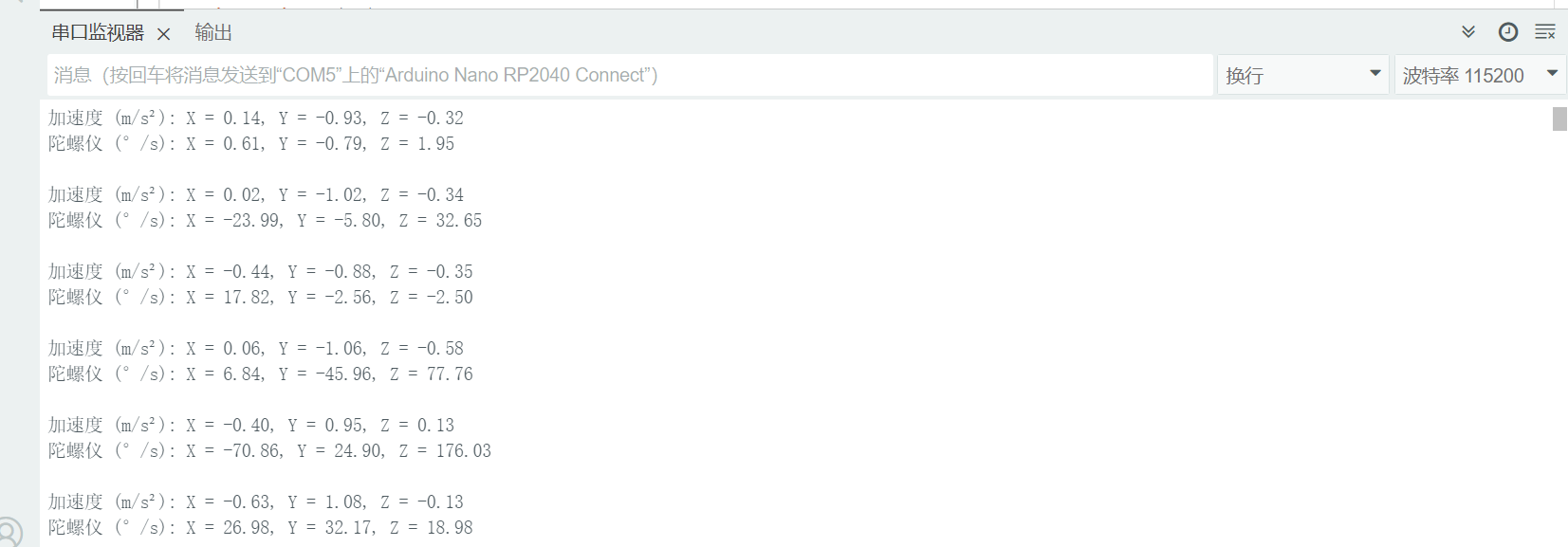
3.查看结果
运行查看串口结果:
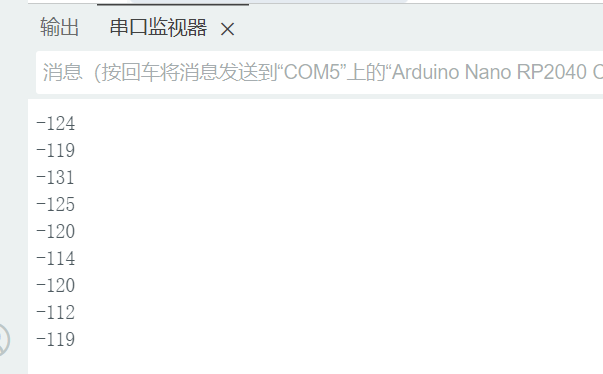
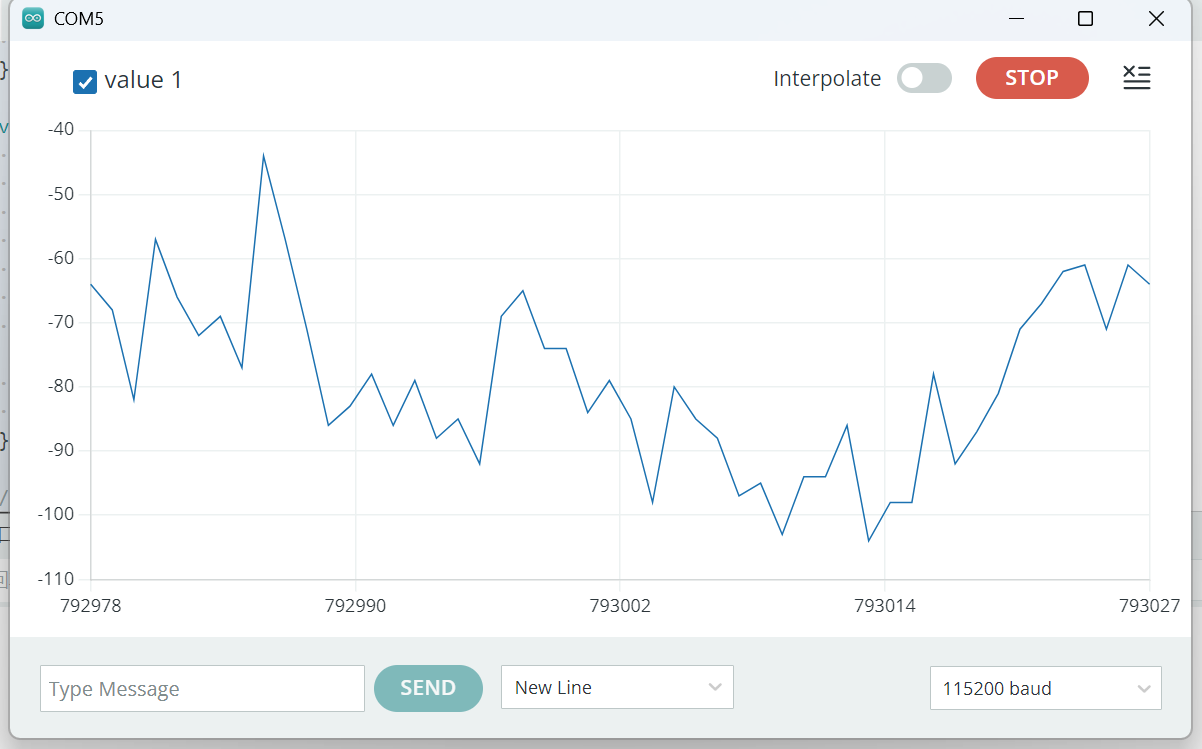
任务三:学习PDM麦克风技术知识,调试PDM麦克风,通过串口打印收音数据和音频波形。
1.准备工作
PDM 麦克风 使用脉冲密度调制技术输出数字音频数据,其输出信号需要经过解码转换为 PCM(脉冲编码调制)数据,才能被处理为音频信号。
板载麦克风型号:Nano RP2040 Connect 上的 PDM 麦克风型号为 MP34DT06JTR。
PDM的库在安装IDE的集成在里面了
2.撰写代码
|
3.查看串口